Кубический робот балансирует на углу
Роботы в большинстве своем похожи друг на друга, они передвигаются на колесах или на ногах, как животные или люди. Но бывают и роботы, лишенные каких-либо внешних подвижных узлов, ярким тому примером является Cubli, он выполнен в кубическом каркасе, подвижные элементы расположены внутри него, они позволяют роботу балансировать в неустойчивых положениях.
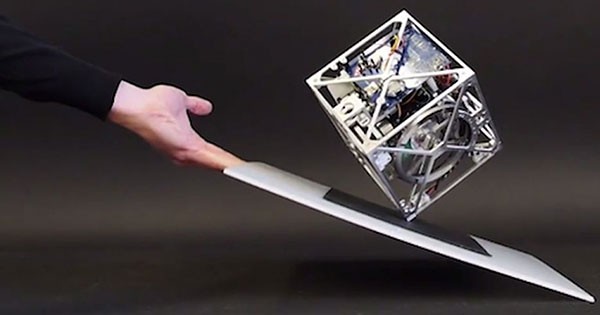
Авторами проекта Cubli стали ученые из Швейцарской высшей политехнической школы Цюриха. В описании системы они уточнили, что равновесие поддерживается не традиционными гироскопами, а компонентами, имеющими аналогичный принцип действия. Данные с сенсоров поступают на встроенный процессор, благодаря которому контроллер «знает», в каком положении в пространстве находится Cubli, система оценивает позицию и ориентацию робота.
Что же касается внутренних подвижных частей, то это три колеса-маховика, которые находятся в постоянном быстром вращении, когда робот активен и готов показать, как он умеет балансировать. Инерционные импульсы от колес производятся в тот момент, когда они набирают высокую угловую скорость и быстро останавливаются. Авторы проекта Cubli предполагают, что данная технология оказалась бы полезной в работе межпланетных исследовательских машин.
Материалы по теме:
Fix Price успешно реализовала пилотный проект по внедрению технологии распознавания очередей на кассах и анализа трафика при помощи компьютерного зрения. Его главные цели – увеличение пропускной способности магазинов и лояльности клиентов за счет открытия дополнительных касс в моменты пиковой загрузки.

На днях в рамках проекта Mind Hub, пространства для расширения деловых связей и обмена экспертизой, прошла конференция iConText Group «Искусственное завтра: нейронавигатор», посвященная технологиям в области ИИ. На одной площадке собрались бизнес-лидеры, инноваторы и эксперты рынка, чтобы разобраться, какой потенциал у нейросетей в сфере бизнеса и какие могут возникнуть с ними проблемы.

9 ноября состоится большая конференция iConText Group на тему «Искусственное завтра: нейронавигатор». Известные спикеры расскажут, как нейросети влияют на рынок труда, чем ИИ-технологии полезны бизнесу, и как государство может регулировать эту сферу. Мероприятие пройдет в рамках проекта Mind Hub – нового пространства для расширения деловых связей и обмена экспертизой. Гостей ждет панельная дискуссия, нетворкинг и живые выступления спикеров из «Русал», Высшей Школы Экономики, «Работа.ру» и других компаний. Ключевым событием станет презентация авторского исследования iConText Group, посвященного ИИ-технологиям.
За последнее время нейросети сделали огромный рывок в своем развитии, и оставалось лишь вопросом времени, когда языковую модель нового поколения внедрят виртуальному помощнику. Первой на этот шаг пошла компания Яндекс. Благодаря искусственному интеллекту YandexGPT, Алиса научилась писать письма и статьи, составлять меню и сценарии к мероприятиям, предлагать идеи и давать советы. По первым отзывам, делает она это не хуже, чем разбирающийся в теме человек. Новые возможности стали доступна в фирменном приложении, браузере, на Яндекс.Станциях и умных телевизорах, где установлен голосовой помощник. Активируется функция фразой «Алиса, давай придумаем!».

Россия долгое время оставалась одним из лидеров по распространению бесконтактных технологий оплаты. Многие производители даже специально встраивали NFC-чипы в гаджеты, предназначенные для нашего рынка. Особую популярность такие платежи приобрели в период пандемии: в 2021 году 32% россиян использовали смартфоны для оплаты товаров и услуг, а эксперты прогнозировали дальнейший рост. Однако в 2022 году, международные платежные системы Google Pay и Apple Pay приостановили свою деятельность у нас, отрезав пользователей от ставших уже привычными методов оплаты. В сложившейся ситуации банки и компании ищут способы найти им замену. Финансовый эксперт и руководитель стартапа Briskly Глеб Харитонов поделился с нами своим виденьем о будущем бесконтактных платежей в России.

На российском рынке представлена новая беспроводная система для презентаций Panasonic PressIT, которая позволяет выводить 4K-контент на дисплей или проектор одним нажатием без установки драйверов и прокладывания кабелей.

Не все технологические продукты приходят к нам из-за границы, бывает, ситуация складывается обратная: компания Mishka AI на днях запустила в США продажи англоязычной версии первого умного плюшевого гаджета Умный Мишка. Игрушку уже можно заказать на сайте компании, а в ближайшее время, она станет доступна на Amazon. В течение следующих трех лет Mishka AI планирует стать одним из лидеров рынка умных игрушек для дошкольников в Америке и продавать в год до 1 миллиона копий.

20 мая отмечается День всеобщей осведомленности о доступности, посвященный популяризации цифровых технологий для пользователей с ограниченными возможностями. Компания Xiaomi отметила его, пригласив группу «особенных» Mi фанов в свой парк науки и технологий. Во время встречи, члены команд по развитию MIUI, искусственного интеллекта, сервисов, IoT и других департаментов пообщались гостями, собрав их запросы, потребности и предложения.

Компания Huawei представила высокопроизводительную систему хранения данных High-End класса OceanStor Dorado. Решение позволяет осуществлять до 21 млн операций ввода-вывода в секунду, обладает показателем надежности 99,9999%, а для ускорения работы использует алгоритмы ИИ. В основе лежит архитектура SmartMatrix, которая позволяет обеспечить доступ к данным, даже если 1 из 2 блоков контроллеров и 7 из 8 контроллеров вышли из строя.
Пандемия кардинально изменила сознание людей: если раньше все ждали презентации нового iPhone, то теперь люди следят за новостями вакцин и защитных средств. Естественно, что многие производители направили усилия на разработку высокотехнологичных приборов, призванных бороться с коварным вирусом. На днях, компания Panasonic представила новое поколение технологии nanoe X, а также работающий на ее основе портативный генератор наночастиц воды с гидроксильными радикалами.
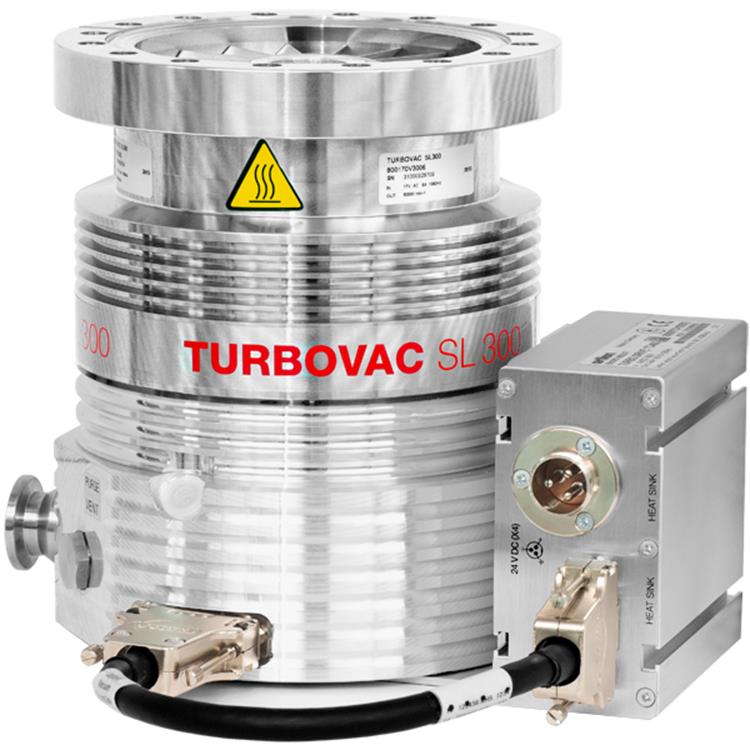
Турбомолекулярный насос получил довольно непростое и даже немного отталкивающее своей сложностью название. На деле же все очень просто – это всего лишь вакуумный насос, только, если можно так выразиться, насос умный.
Устройства, которые обеспечивают высокую скорость беспроводного доступа к интернету, становятся сегодня особенно актуальными как для комфортной удаленной работы из дома, так и для выполнения ежедневных задач в офисе. Поэтому, компания TCL Communication объявила о старте продаж в России интернет-центра Alcatel LINKHUB HH71V1 и 4G USB-модема Alcatel LINKKEY IK41VE1. Первые поставки новинок на российский рынок уже начала осуществлять компания MERLION.

Пока весь мировой бизнес «колотит» из-за пандемии, российский стартап bobber анонсировал линейку премиальных термосов под названием Flask. Уникальность продукта в том, что он удерживает тепло до двух суток, что является абсолютным мировым рекордом на рынке. Этого удалось добиться за счёт сочетания технологических и инженерных решений, а за продуманный дизайн продукт получил награду Red Dot Awards.

Хостинг-провайдеры предлагают широкий выбор разнообразных тарифов — и если человек разбирающийся сразу знает, что ему нужно, то новичку несложно и запутаться. Мы решили рассмотреть эту проблему и дать несколько полезных советов на тему выбора тарифа для хостинга, чтобы вы не переплачивали за ненужные функции. А подробный обзор хостингов можно найти здесь. Итак, первое, что нужно сделать, это определиться с типом хранения данных. Исходя из этого параметра, есть три основных варианта: выделенный сервер, виртуальный сервер и виртуальный хостинг. Вкратце изучим их особенности.

Компания Amazon ведет разработку новых кассовых терминалов, которые позволят покупателю оплачивать свои покупки буквально при помощи руки. Другими словами, Amazon создает «ручные сканеры». Устройства свяжут информацию о дебетовой или кредитной карте любого банка с ладонью пользователя, как пишет издание The Wall Street Journal. В итоге можно будет даже отказаться от оплаты при помощи сотового телефона, которая многим сейчас кажется такой удобной. Информацию предоставили источники, приближенные к разработке новой технологии.

Анонсирован новый одноплатный компьютер HardROCK64, наделенный современной электроникой, но созданный далеко не для всех. По замыслу авторов, его основная аудитория – разработчики и техногики, хотя это ни в чем не проявляется.

Украинское подразделение компании Firefly Aerospace присоединилось к американскому отделу для тестирования ракеты-носителя Alpha. В частности, специалисты начали совместное тестирование первой ее ступени. Это самая важная часть испытаний, а сам пуск предварительно запланирован на 19 февраля 2020 года.

Согласно исследованиям, сегмент электротранспорта увеличился в России более чем на 30% за 2018 год и почти на 50% в 2019 году, а за последний год у нас в стране появилось более 500 000 скутеров и электросамокатов. Видя большой потенциал, компания Ninebot-Segway совместно с официальным дистрибутором «Марвел» представили новинку – электросамокат Ninebot KickScooter MAX G30P, способный разогнаться до 30 км/ч.

Оператор связи Tele2 сообщил о запуске первой в России сотовой сети пятого поколения, 5G. Само собой, речь идет пока только о пилотной зоне, и, разумеется, сеть развернули не селе Кукуево, а прямо в центре Москвы.

По итогам 4 квартала 2018 года российский рынок серверов показал неплохой рост, особенно на фоне ужасной российской экономики. В деньгах он вырос на 24,3 процента, а в количественном эквиваленте – на 1,5 процента, и это стало возможным в первую очередь за счет высокопроизводительных моделей, которым отдают предпочтение крупные корпорации. Другими словами, малый бизнес по-прежнему не готов тратить деньги на модернизацию, так что вся надежда на бизнес крупный.

Рассылка писем – мощный и удобный инструмент донесения информации до пользователей, к примеру, о новом бизнесе, крупной акции или важном мероприятии. Но при неправильном использовании можно резко снизить лояльность потенциальных клиентов и навлечь на себя и свой бренд лишний негатив. Существует 5 правил качественной рассылки, следуя которым, можно получить от нее максимальную пользу.

В 2019 году существует множество видов хостинга, и отличить один от другого человек, впервые столкнувшийся с этим, сможет далеко не всегда. Особенно это касается тех, кому сайт был нужен еще вчера, все сроки вышли, и приходится быстро погружаться в тему хостинга. Сейчас кратко пробежимся по основным видам, наиболее востребованным как в России, так и за рубежом.

Взгляните на карту покрытия любого оператора сотовой связи России – она изобилует белыми пятнами. Это территория, где связи нет в принципе – только допотопные проводные телефоны, и нередко белые области у операторов совпадают. Но там тоже живут люди, и им тоже требуется удобное общение по мобильным устройствам, и решений в этой ситуации есть лишь два – смена места жительства или применение усилителей связи. С последним гарантированно поможет компания MobileBooster.
IBM презентовала Q System One – прототип квантового компьютера в компактном корпусе. Разработка позиционируется производителем не только как система, рассчитанная на научное применение, но и в качестве устройства в коммерческих целях. По сути, речь идет о компактном модульном квантовом компьютере.

КоммерсантЪ сообщает, что в России ведется разработка уникального суперкомпьютера, в основу которого лягут процессоры отечественного производства. Итоговый супер-ПК может стать одним из самых мощных в стране, а на его разработку потратят более 1 миллиарда рублей.
